
Nina and Peter proudly present: Our (first?) electric longboard!
 Nina (my sister) made the deck (complete with carp), I was responsible for the electronics.
Nina (my sister) made the deck (complete with carp), I was responsible for the electronics.I wanted to build such a board for years, and as Nina suddenly said the same we started the project immediately. As she knows her way around wood and knows how to draw her part was clear.
First big hurdle for me was the motor mount. Most projects I've found solved this with lots of welding or buying a cheap board from china as a starting point. I didn't really like what I've found until I stumbled upon what Richard from Alien Drive Systems just started selling: A really nice CNC manufactured kit which uses stock trucks and wheels without modifications. And even in Europe, oh joy of joys!
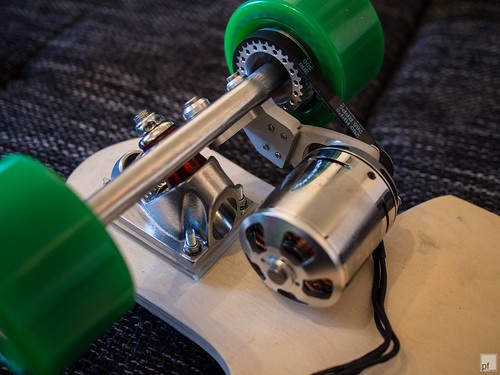 Next: Motor and controller. Playing around with multicopters for years I was quite familiar with the awesomeness that are brushless motors. Very powerful, very light. Deviating from Richards recommendations, I bought motor, ESC (controller), remote and battery from the great chinese RC online shop Hobbyking. After calculating a bit I bought the Turnigy Aerodrive SK3 - 6364-190kv motor, which should be good for a theoretical top speed of 33 km/h with six LiPo cells.
Next: Motor and controller. Playing around with multicopters for years I was quite familiar with the awesomeness that are brushless motors. Very powerful, very light. Deviating from Richards recommendations, I bought motor, ESC (controller), remote and battery from the great chinese RC online shop Hobbyking. After calculating a bit I bought the Turnigy Aerodrive SK3 - 6364-190kv motor, which should be good for a theoretical top speed of 33 km/h with six LiPo cells.Good enough (After driving this thing flat out I still think that).
As ESC I chose a Turnigy TrackStar 150A which is powerful enough to drive the half kilo of motor and has electric brakes. Battery is a self assembled pack of 6x 5800Ah Lithium-Polymer cells. The motor could cope with ten, but the ESC does not. I planed to build the remote myself but bought a cheap 2.4GHz remote Turnigy HK-210 as temporary solution.

First real test happend at a BBQ and the board was really great. Seemingly endless battery power, enough speed to frighten you easily, enough power to climb hills, very controllable, just awesome! Up until the remote just died while driving and a friend of mine needed to jump off at full speed. He lost enough skin to put his hands out of commission for a week but was ok otherwise. A drop of blood is still visible on the grip tape.
Hobbyking refunded my money for the remote and I started to build my own remote based on two Arduinos. I started with RFM12 wireless modules but switched to RF24 after a while. The first thing I've implemented was a failsave.
 |
| Urban transport |
 The shell is a a car remote, stipped down to the handle. I really want to use my 3D printer to print one myself, another sub project from this one.
The shell is a a car remote, stipped down to the handle. I really want to use my 3D printer to print one myself, another sub project from this one.I like the not-pistol shaped design from the boosted-board controller, but it's a bit small to include all the functionality I want.
 |
| Messy and productive |
Parts list
| Remote | Arduino based self made |
| ESC | Turnigy TrackStar 150A |
| Motor | Turnigy Aerodrive SK3 - 6364-190kv |
| Battery | 6x 5800Ah LiPo 25C |
| Motor mount | Alien Drive Single |
| Trucks | Holey trucks |
| Wheels | ABEC 11 - 83mm |
| Bearings | BILTIN Bearings - ABEC7 |
| Deck | birch wood selfmade 40' |
| Grip tape | clear Black Diamond |
| Battery box | Rosti Mepal Modula tupperware |
All in all around 600€.
Useful links
- My github page- Deck templates
- Masterful build
- Richards first board
- Alien Drive Systems
- More pics
awesome project - im really impressed how small all the attachments got! looks cool as well and it seems you gained great knowledge by this project. *hut ab*
AntwortenLöschenYeah, was (and is) great fun.
AntwortenLöschenI really wanted to build to remote myself as my first big Arduino project. There is still a lot to do but it'll get there... =)
Hi, i would like to know how is the math for the motor.
AntwortenLöschenThats how:
Löschenhttps://farm6.staticflickr.com/5791/21135049120_4e385dbcbf_o.png
Calculate the wheel circumfence and the maximum voltage of your battery and together with the motor KV and transmission you have your top speed.
Motor power should be at least 500W I think.
Thanks, this table is from a online calculator? i´ve looking for some calculators but require too much information, i made a fast calculations for gear ratio and rpm required and power (power=velocity*force) ends in 5317W?? i think there is something wrong or isnt the right formula for this (my mechanical teacher doesnt know how is this posible its needed a 7.5 Hp motor but thats a lot so im not sure about the formulas required to get all the numbers
Löschenelectric longboard! Nina (my sister) made the deck (complete with carp), I was responsible for the electronics. I wanted to build such a board for ... ielectriclongboard.blogspot.com
AntwortenLöschen